
 English
English
Kỹ Thuật Nuôi, Tin tức
Phần 2 – Nghiên Cứu Về Hoạt Động Kiếm Ăn Của Tôm Thẻ Chân Trắng Dựa Trên Phát Hiện Âm Thanh Thụ Động
III. PHÂN TÍCH CÁC TÍN HIỆU CHO ĂN
A. Sự hình thành các tín hiệu cho ăn
Trong quá trình thu thập tín hiệu, thông qua camera có thể quan sát thấy rằng trước lần cho ăn đầu tiên, hầu hết tôm không di chuyển dưới đáy bể, và có một số con đang bơi. 30 giây sau khi thu thập tín hiệu, lượng thức ăn cần thiết đã được đưa vào bể, và hầu hết tôm bắt đầu bơi và lấy thức ăn. Với sự gia tăng thời gian thu thập tín hiệu, hầu hết tôm đã dần dần ngừng bơi và tập trung ăn ở đáy bể. Trước lần cho ăn thứ hai, tình hình trong bể giống như trong lần thu thập tín hiệu cho ăn đầu tiên. Sau khi cho ăn, chỉ có một số ít tôm di chuyển để lấy thức ăn. Cho đến lần thu thập tín hiệu cho ăn thứ ba, hầu như không có tôm nào di chuyển sau khi cho ăn.
Quan sát miền thời gian của 3 tín hiệu thu thập được, kết quả nhận thấy trước khi thức ăn cho vào bể thí nghiệm 5 con tôm hầu như không phát ra tín hiệu nào. Sau 30 giây, các tín hiệu được phát hiện và thu thập, như trong Hình 4 (a), (b) và (c). Sau 30 giây nhận được tín hiệu, thức ăn đã được cho ăn. Thông qua camera, có thể thấy tôm bắt đầu di chuyển để lấy thức ăn và ăn, và tín hiệu âm thanh được tạo ra trong quá trình di chuyển của tôm được thu thập. Khi số lần cho ăn tăng lên, hầu hết tôm ngừng di chuyển để lấy thức ăn. Hiện tượng này cho thấy chuyển động của tôm để lấy thức ăn thể hiện hoạt động kiếm ăn. Khi tôm được cho ăn lần đầu, mức độ đói cao, số lượng tín hiệu thu được dày và lớn. Các tín hiệu được tạo ra trong toàn bộ thời gian thu thập cho biết tiến trình của các hoạt động kiếm ăn ở tôm. Với việc tăng thời gian cho ăn, mức độ đói của tôm giảm xuống. Chúng dần dần ngừng di chuyển và số lượng tín hiệu âm thanh thu được giảm dần. Cho đến khi kết thúc giai đoạn thu thập tín hiệu cho ăn lần thứ ba, không có tín hiệu nào được thu thập. Ba tín hiệu cho ăn được thu thập trong bể thí nghiệm 10 con tôm gần giống với tín hiệu trong bể thí nghiệm 5 con tôm, như được thể hiện trong Hình 4 (d), (e) và (f).
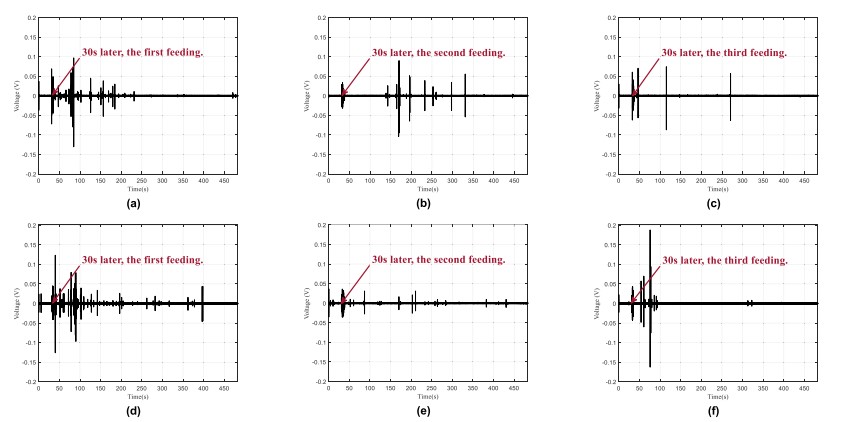
Hình 4. Miền thời gian thu thập tín hiệu cho 3 lần cho ăn khác nhau. (a, b, c) 5 con tôm, (d, e, f) 10 con tôm.
Tín hiệu được phân tích bằng phép biến đổi Fourier thời gian ngắn và độ dài cửa sổ là 0,1 giây. Đối với trường hợp số lượng tôm ở mỗi bể thí nghiệm khác nhau, 30 giây sau lần cho ăn đầu tiên, năng lượng 15-25dB trong dải tần số 2-10KHz tăng lên đáng kể và kéo dài trong 10 giây sau khi bắt đầu cho ăn, như được hiển thị trong khung màu đỏ của Hình 5. Trong khoảng thời gian sau, năng lượng tăng lên đáng kể, cho thấy quá trình của các hoạt động kiếm ăn của tôm.
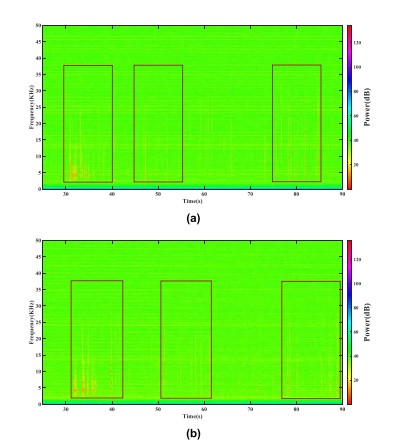
Hình 5. Sự phân bố tần số theo thời gian của tín hiệu thu được trong lần cho ăn đầu tiên. (a) 5 con tôm, (b) 10 con tôm.
B. Phân tích miền thời gian dạng sóng và phổ tần số của tín hiệu cho ăn
Tín hiệu âm thanh cho ăn do chuyển động của tôm thẻ chân trắng thu thập được trong thí nghiệm ở dạng xung đơn, như được biểu thị bằng biểu đồ phóng đại trong khung màu đỏ ở Hình 6. Phạm vi thời lượng tín hiệu là 8-10ms và dải tần số là 2-10KHz. Có một quang phổ cực đại gần tần số 5KHz và cường độ vào khoảng – 78dB, như thể hiện trong Hình 7 (a). So sánh miền tần số dạng sóng giữa khoảng thời gian cho tôm ăn và không cho tôm ăn, có thể thấy rằng trong khoảng 2-10KHz, năng lượng tín hiệu của tôm được cho ăn cao hơn tôm không được cho ăn. Điều này cho thấy rằng các tín hiệu âm thanh mới được tạo ra trong quá trình cho ăn, như thể hiện trong Hình 7 (b).
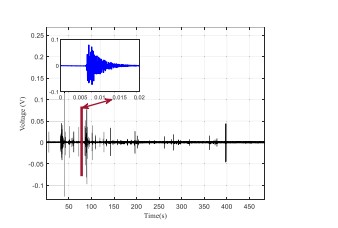
Hình 6. Tín hiệu cho ăn
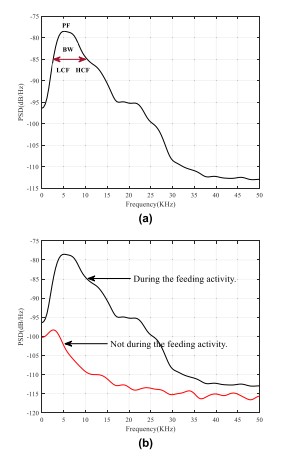
Hình 7. Miền tần số dạng sóng của tín hiệu cho ăn.
So sánh với tín hiệu âm thanh cho ăn của tôm sú Penaeus monodon được nghiên cứu bởi Daniel và cộng sự, hầu hết năng lượng tín hiệu của tín hiệu âm thanh khi cho tôm sú ăn tập trung ở dải tần số cộng hưởng trung bình từ 3KHz – 7,6KHz, thời lượng tín hiệu từ 0,48ms – 0,72ms, và đỉnh cực đại xuất hiện trong khoảng 5-10KHZ.
C. Mối tương quan giữa tín hiệu âm thanh lúc cho ăn và chuyển động bơi
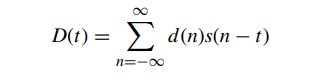
Tôm thẻ chân trắng Litopenaeus vannamei ở trong trạng thái lờ đờ khi thiếu oxy, và hầu hết đang bơi nhanh trong bể. Thí nghiệm đã tiến hành thu thập tín hiệu dữ liệu kéo dài 1 phút cho tình huống này, như được thể hiện trong Hình 8. Tính toán tương quan được thực hiện giữa tín hiệu cho ăn d (t) và tín hiệu lờ đờ khi thiếu oxy của tôm s (t), để có được giá trị được phát hiện, đại diện cho giá trị tương quan D tại mỗi bước thời gian t.
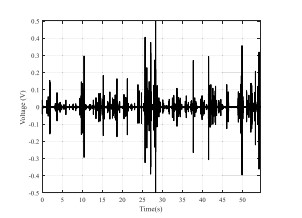
Hình 8. Miền thời gian của tín hiệu chuyển động của tôm trong trạng thái thiếu oxy.
Thông qua thuật toán phát hiện tương quan, giá trị tương quan cao hơn 0,05, điều này cho thấy mối tương quan giữa các tín hiệu là cao, thể hiện qua đường màu đỏ trong Hình 9. Kết quả này cũng cho thấy tôm di chuyển mạnh khi chúng đói, sau đó đớp thức ăn và tạo ra tín hiệu âm thanh chuyển động, đây chính là các bước trong hoạt động kiếm ăn của tôm.
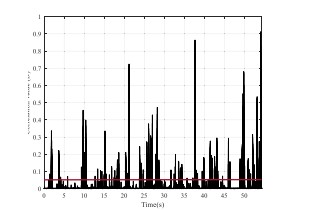
Hình 9. Mối tương quan giữa tín hiệu chuyển động của tôm ở trạng thái thiếu oxy và tín hiệu cho ăn một lần.
IV. PHÁT HIỆN PHẠM VI HIỆU QUẢ CỦA CÁC TÍN HIỆU CHO ĂN
Trước khi phát hiện phạm vi hiệu quả của tín hiệu cho ăn, tín hiệu ban đầu đo được sẽ được xử lý trước và bộ lọc thông dải được áp dụng cho tín hiệu, do đó sẽ loại bỏ được tiếng ồn từ môi trường hoặc máy móc lên tín hiệu mục tiêu. Tiếp theo, thông qua phát hiện ngưỡng, điểm bắt đầu và điểm kết thúc của tín hiệu được phát hiện.
Trong lần xử lý tín hiệu cho ăn tiếp theo, chỉ có một đoạn tín hiệu được xử lý.
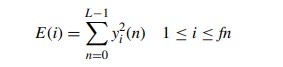
Trong nghiên cứu này, phương pháp ngưỡng kép được sử dụng để phát hiện phạm vi hiệu quả của các tín hiệu cho ăn. Thuật toán dựa trên năng lượng ngắn hạn và tỷ lệ qua điểm 0 trung bình ngắn hạn của tín hiệu. Tín hiệu cho ăn hiệu quả của tôm được xác định bằng phương pháp đánh giá ngưỡng hai mức độ. Sau quá trình chuẩn hóa, tín hiệu thu thập được lần đầu tiên được xử lý bằng cách phân chia cửa sổ, với độ dài cửa sổ là 0,01s. Trên cơ sở phân chia cửa sổ, năng lượng trung bình ngắn hạn và tỷ lệ qua điểm 0 trung bình ngắn hạn của tín hiệu sẽ được thực hiện, so sánh và phán đoán theo giá trị ngưỡng.
Giả sử miền thời gian của tín hiệu thu thập được là s(n) và tín hiệu cửa sổ thứ i thu được sau khi tạo cửa sổ bởi hàm cửa sổ w(n) là yi (n), khi đó yi (n) thỏa mãn:

Trong phương trình:
w(n) là cửa sổ Hamming
yi (n) là biên độ điện áp mà tín hiệu cửa sổ thứ i thu được,
L là chiều dài cửa sổ; inc là chiều dài cửa sổ thay đổi
fn là tổng số cửa sổ thu được.
Phương trình năng lượng ngắn hạn để tính toán tín hiệu cửa sổ thứ i là:
Tỷ lệ vượt mức 0 trung bình ngắn hạn cho biết số lần sóng tín hiệu vượt qua mức 0 trong tín hiệu cửa sổ. Đối với tín hiệu liên tục, giao nhau bằng 0 có nghĩa là miền thời gian dạng sóng đi qua trục thời gian; đối với tín hiệu đứt khúc, nếu các giá trị mẫu liền kề thay đổi dấu hiệu, nó được gọi là giao nhau không. Tỷ lệ vượt qua điểm 0 trung bình ngắn hạn là số lần dấu hiệu thay đổi giá trị mẫu.
Phương trình tỷ lệ qua điểm 0 trung bình ngắn hạn để tính tín hiệu cửa sổ thứ i là:

Sau khi tính toán năng lượng ngắn hạn và tỷ lệ qua điểm 0 trung bình ngắn hạn của tín hiệu, quyết định đầu tiên được đưa ra. Đầu tiên, theo năng lượng ngắn hạn của tín hiệu, ngưỡng H1 cao hơn được chọn để đánh giá sơ bộ. Có điểm bắt đầu và điểm kết thúc của tín hiệu cho ăn trong phạm vi nằm ngoài điểm thời gian tương ứng với giao điểm của ngưỡng này và vùng năng lượng ngắn hạn. Sau đó, chọn ngưỡng H2 thấp hơn, tiếp tục tìm kiếm từ phạm vi có thể của phán đoán sơ bộ cuối cùng, và tìm hai điểm A và B nơi ngưỡng H2 giao với đường bao năng lượng ngắn hạn. Hai điểm này là điểm bắt đầu và điểm kết thúc của tín hiệu cho ăn được xác định bởi năng lượng ngắn hạn. Sau đó, một phán đoán thứ cấp được thực hiện trên cơ sở của phán đoán đầu tiên. Tại thời điểm này, dựa trên tỷ lệ vượt 0 trung bình ngắn hạn, hãy chọn (3) ngưỡng H3 và tiếp tục tìm kiếm từ bên ngoài phạm vi được xác định bởi các điểm A và B, và hai điểm C và D nơi ngưỡng và tỷ lệ giao nhau bằng 0 trung bình ngắn hạn cắt nhau tương ứng. Cuối cùng, phạm vi giữa các mốc thời gian tương ứng với điểm C và D là phạm vi hiệu quả của tín hiệu cho tôm ăn.
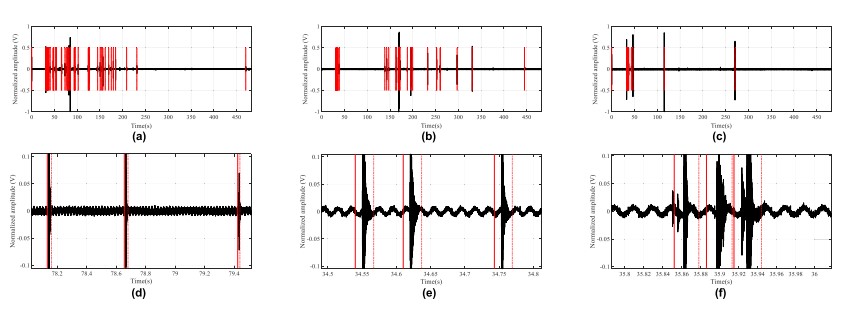
Hình 10. Phát hiện phạm vi hiệu quả của tín hiệu cho ăn (5 con tôm).
(a, d) Lần cho ăn đầu tiên, (b, e) Lần cho ăn thứ hai, (c, f) Lần cho ăn thứ ba.
Hình 10 (a), (b), và (c) cho thấy kết quả phát hiện phạm vi hiệu quả của các tín hiệu được thu thập bởi 3 lần cho ăn trong bể thí nghiệm 5 tôm. Các khung màu đỏ là tín hiệu được phát hiện. Hình 10 (d), (e) và (f) là tín hiệu khi được xem ở chế độ phóng to. Đường màu đỏ liền là điểm bắt đầu của tín hiệu cho ăn và đường màu đỏ đứt khúc là điểm kết thúc của tín hiệu cho ăn. Theo hình vẽ, số lượng tín hiệu được phát hiện trong lần cho ăn đầu tiên cao hơn so với hai lần cho ăn còn lại. Tín hiệu âm thanh chuyển động do tôm tạo ra trong quá trình cho ăn sẽ giảm dần khi tôm không còn cảm giác đói và tăng thời gian cho ăn. Kết quả phát hiện tín hiệu của 3 lần cho ăn trong bể thí nghiệm 10 con tôm gần giống với kết quả trong bể thí nghiệm 5 con tôm, như được thể hiện trong Hình 11.
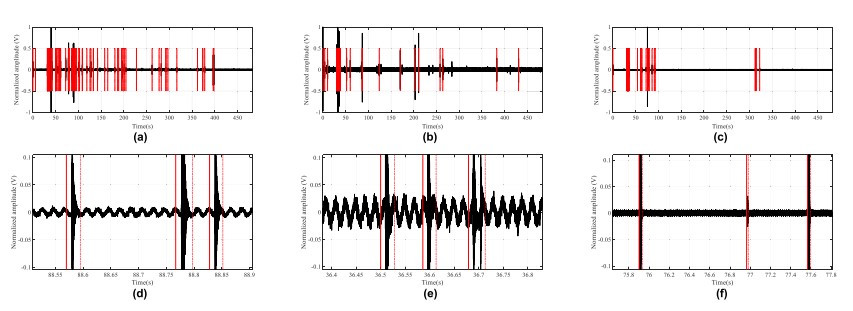
Hình 11. Phát hiện phạm vi hiệu quả của tín hiệu cho ăn (10 con tôm).
(a, d) Lần cho ăn đầu tiên, (b, e) Lần cho ăn thứ hai, (c, f) Lần cho ăn thứ ba.
Theo số lượng tín hiệu được tạo ra bởi các số lượng tôm và thời gian cho ăn khác nhau, như trong Hình 12. Trong lần cho ăn đầu tiên, số lượng tín hiệu âm thanh được tạo ra bởi 10 con tôm trong 8 phút có thể lên tới 88, và số lượng tín hiệu âm thanh của 5 con tôm có thể lên tới 47. Hơn một nửa số tín hiệu được phát hiện trong vòng 1 phút sau khi cho ăn. Với sự gia tăng thời gian, số lượng tín hiệu cũng dần giảm xuống. Trong giai đoạn sau, hầu như không có tín hiệu được phát hiện. Tức là, với sự gia tăng thời gian cho ăn, mức độ đói của tôm sẽ giảm xuống, dần dần ngừng chuyển động, và số lượng tín hiệu âm thanh thu thập được cũng giảm xuống. Đồng thời, ở bể thí nghiệm 10 con tôm, số lượng tín hiệu ăn của tôm thu được sau 3 lần cho ăn cao hơn ở bể thí nghiệm 5 con tôm. Hiện tượng này cho thấy số lượng tôm và mức độ đói của tôm tỷ lệ thuận với số tín hiệu bắt mồi của tôm. Khi số lần cho ăn tăng lên, mức độ đói của tôm và số lượng tín hiệu bắt mồi của tôm càng giảm.
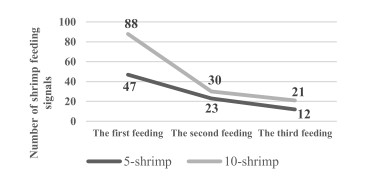
Hình 12. Thống kê số lượng tín hiệu bắt mồi của tôm
V. PHÂN TÍCH TÍN HIỆU TIẾNG ỒN
Khi máy tạo oxy không được tắt, tiếng ồn sẽ liên tục được tạo ra ảnh hưởng đến việc thu tín hiệu. Trong các thuật toán phát hiện trong tương lai, vấn đề mấu chốt là làm thế nào để phát hiện tín hiệu cho ăn từ tiếng ồn liên tục do máy tạo oxy gây ra. Tín hiệu do máy tạo oxy tạo ra tương tự như tín hiệu âm thanh khi ăn của tôm và trong miền thời gian, nó cũng là tín hiệu xung đơn lặp đi lặp lại, như trong Hình 13.
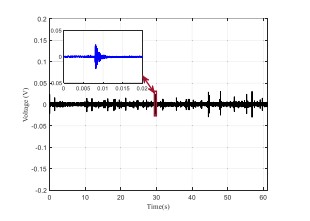
Hình 13. Miền thời gian của tiếng ồn từ máy tạo oxy.
Tín hiệu sau khi thu thập được chồng lên tín hiệu cho ăn như một chuỗi các tín hiệu xung. Trong miền tần số, dải tần số của tín hiệu tiếng ồn là 7-13KHz. Trung bình, dải cộng hưởng cao hơn so với tín hiệu cho ăn và có sự chồng chéo một phần của các dải tần số, như thể hiện trong Hình 14.
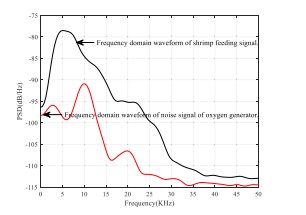
Hình 14. So sánh miền tần số giữa tín hiệu tiếng ồn của máy tạo oxy và tín hiệu cho ăn.
Trong các môi trường thử nghiệm khác, có các giao thoa xung khác, cùng với sự giống nhau về thời gian của các sự kiện bắt nguồn và giao thoa, dẫn đến đánh giá sai trong việc phát hiện tín hiệu, điều này cho thấy khó khăn tiềm ẩn trong việc phân biệt các hoạt động kiếm ăn với các loại nhiễu xung khác.
VI. PHẦN KẾT LUẬN
Thông qua việc so sánh phân tích miền thời gian tín hiệu và bản ghi hình thực tế, trong trường hợp số lượng tôm khác nhau, không có tín hiệu âm thanh nào được thu thập khi chúng không được cho ăn và sau 30 giây thu được tín hiệu, thức ăn đã được cho ăn, âm thanh tín hiệu đã được thu thập. Khi cho tôm ăn lần đầu, mức độ đói của tôm cao. Tôm chộp lấy thức ăn và ăn bằng cách bơi. Khi số lần cho ăn tăng lên, tình trạng đói của tôm giảm đi và cường độ vận động có xu hướng giảm. Tôm dần dần ngừng vận động và sau đó ngưng ăn. Hiện tượng này cho thấy việc bắt đầu cho tôm ăn sẽ tạo ra các tín hiệu liên quan và nó liên quan đến chuyển động của tôm. Bằng cách so sánh tín hiệu thu thập được với tín hiệu âm thanh của tôm di chuyển trong tình trạng thiếu oxy, giá trị tương quan cao, điều này cho thấy thêm rằng khi tôm đói, nó sẽ bơi và lấy thức ăn để tạo ra tín hiệu âm thanh.
Dựa trên công nghệ giám sát âm thanh thụ động để thu thập tín hiệu âm thanh khi chuyển động ăn của tôm thẻ chân trắng, thông qua phân tích miền thời gian và miền tần số, kết quả thấy rằng tín hiệu tương tự như tín hiệu xung đơn, thời lượng khoảng 8-10ms và dải cộng hưởng trong miền tần số là 2-10KHz. Việc phát hiện phạm vi hiệu quả của tín hiệu cho ăn của tôm được thực hiện bằng phương pháp ngưỡng kép, và sau đó số lượng tín hiệu cho ăn của tôm được tính toán. Dựa trên phân tích thống kê, số lượng tín hiệu phát ra trong lần cho ăn đầu tiên của bể thí nghiệm chứa 10 con tôm là lớn nhất. Với việc giảm số lượng tôm, tăng thời gian cho ăn và giảm mức độ đói của tôm, số lượng tín hiệu cho ăn được tạo ra giảm dần, điều này cung cấp cơ sở lý thuyết cho việc kiểm soát lượng cho ăn theo yêu cầu.
Đồng thời, các tiếng ồn liên tục khác sẽ có tác động lớn đến việc thu thập và phát hiện tín hiệu ăn của tôm. Tín hiệu xung nhiễu do máy tạo oxy tạo ra chồng lên một phần dải tần số cộng hưởng của tín hiệu ăn của mục tiêu. Đối với những nghiên cứu trong tương lai, chúng tôi sẽ xem xét cách phát hiện chính xác tín hiệu cho ăn của mục tiêu dưới tiếng ồn do máy tạo oxy tạo ra, để tìm ra phương pháp cho tôm ăn tự động và thông minh, đồng thời nâng cao lợi ích kinh tế.
Nhóm tác giả: Maochun Wei, Yating Lin, Keyu Chen, Wei Su, (Member, Ieee), và En Cheng
Nguồn: https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=9178285
Biên dịch: Huyền Thoại – Bình Minh Capital
Xem thêm:
- Phần 1 – Nghiên Cứu Về Hoạt Động Kiếm Ăn Của Tôm Thẻ Chân Trắng Dựa Trên Phát Hiện Âm Thanh Thụ Động
- Tổng Hợp Về Bệnh Vi Bào Tử Trùng EHP Trên Tôm
- Liệu Salicornia Có Thể Xử Lý Hiệu Quả Nước Thải Trong Nuôi Trồng Thủy Sản Không?